
차례
부품 목록
왼발의 부품 목록은 다음과 같습니다. 오른발을 조립하려면 ‘_ mirror’라는 접미사가 있는지없는 부품에 적절하게 바꾸십시오.
인쇄 세부 정보
조립 공정
부품 목록
대퇴골
Attention! : 왼쪽 허벅지를 조립함에있어 servo_assem_type2_mirror.stl 를 사용해야합니다. 그러나 오른쪽 허벅지를 조립하려면, servo_assem_type2.stl 를 사용해야합니다.
무릎
어퍼 발
Attention! : 왼발 상단 조립있어서 servo_assem_type2.stl 를 사용해야합니다. 그러나 오른발 상단 조립시에는 servo_assem_type2_mirror.stl 를 사용해야합니다.
낮은 발
Attention! : 플라스틱 성형 부품 판의 조립의 경우이 단계는 필요하지 않습니다.
부품을 병합
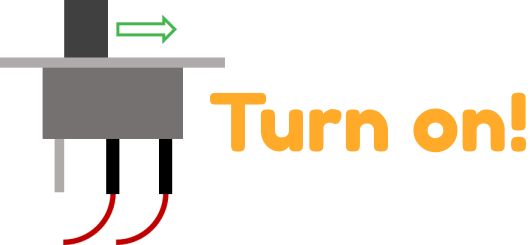
Attention! : 부품을 결합하기 전에 컨트롤 보드와 서보 모터를 연결하십시오. 연결이 설정되면 두 스위치를 ON으로 그 상태를 유지합니다.
Attention! : 흰색 케이블이 컨트롤 보드 안쪽에 위치하도록 서보 모터를 연결하십시오.
Attention! : 왼쪽 허벅지에 서보 혼을 장착합니다. 이 때, 서보 모터의 옆에 서보 혼이 대략 수평 수직이되도록합니다.
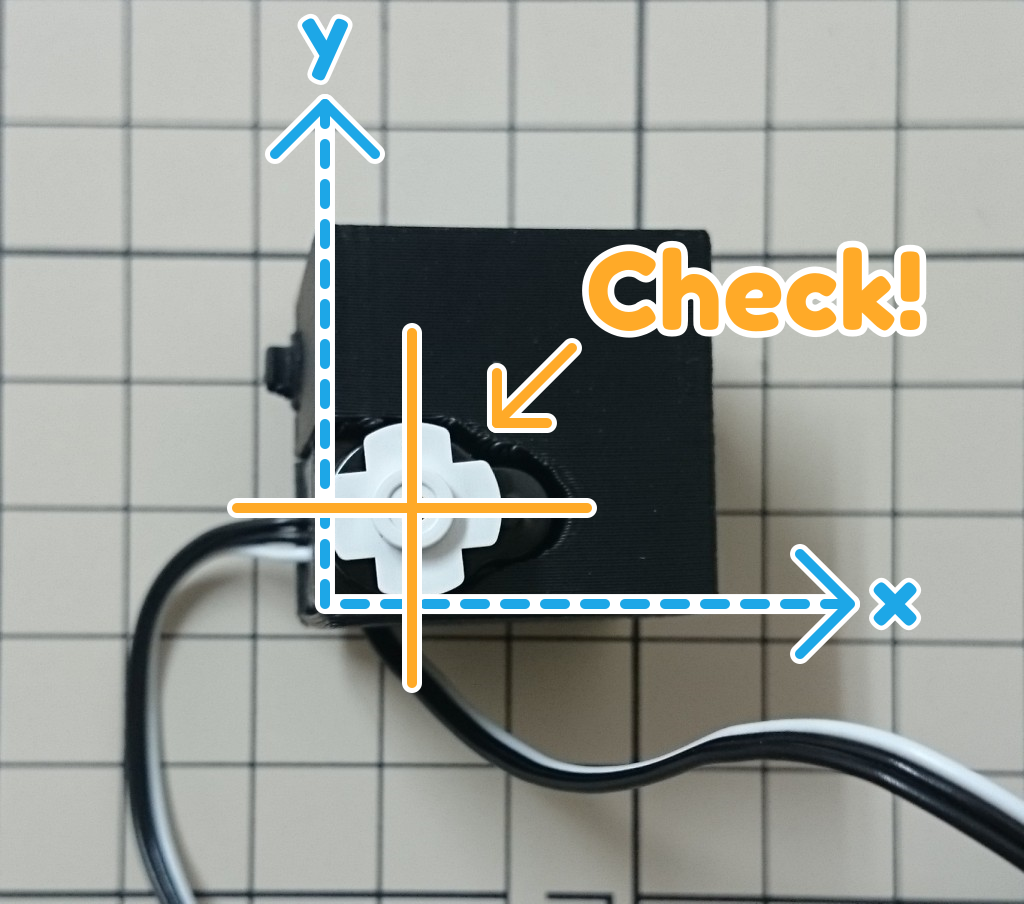
Attention! : 왼쪽 무릎에 서보 혼을 장착합니다. 이 때, 서보 모터의 옆에 서보 혼이 대략 수평 수직이되도록합니다.
Attention! : 왼발 상단에 서보 혼을 장착합니다. 이 때, 서보 모터의 옆에 서보 혼이 대략 수평 수직이되도록합니다.
Attention! : 왼쪽 정강이와 왼발 상단을 결합시 서보 모터의 케이블을 왼쪽 정강이 안쪽에 넣습니다.
Attention! : 왼발 상단에 서보 혼을 장착합니다. 이 때, 서보 모터의 옆에 서보 혼이 대략 수평 수직이되도록합니다.