
차례
예비 약정
후디의 초기 위치를 조정함에있어 펌웨어 버전 1.1.0 이후 에해야합니다. 이후의 절차를 수행하기 전에 다운로드 및 설치를 부탁드립니다.
프로세스까지 조정
최신 버전의 “ControlServer” 를 다운로드합니다.  로보노이드를 USB 케이블 (tyep micro B)에 연결합니다.
로보노이드를 USB 케이블 (tyep micro B)에 연결합니다.  Windows 사용자의 경우 server.exe 를 OSX 사용자의 경우 server.app 를 시작합니다.
Windows 사용자의 경우 server.exe 를 OSX 사용자의 경우 server.app 를 시작합니다. 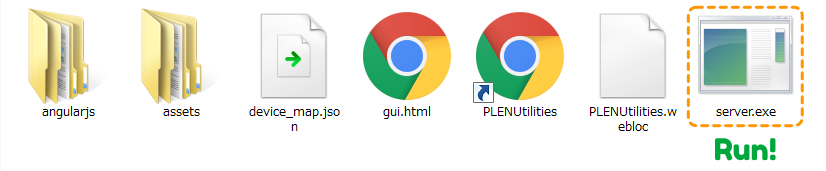 Windwos 고객은 PLENUtilities.url 를 OSX 사용자의 경우 PLENUtilities.webloc 을 더블 클릭합니다.
Windwos 고객은 PLENUtilities.url 를 OSX 사용자의 경우 PLENUtilities.webloc 을 더블 클릭합니다. 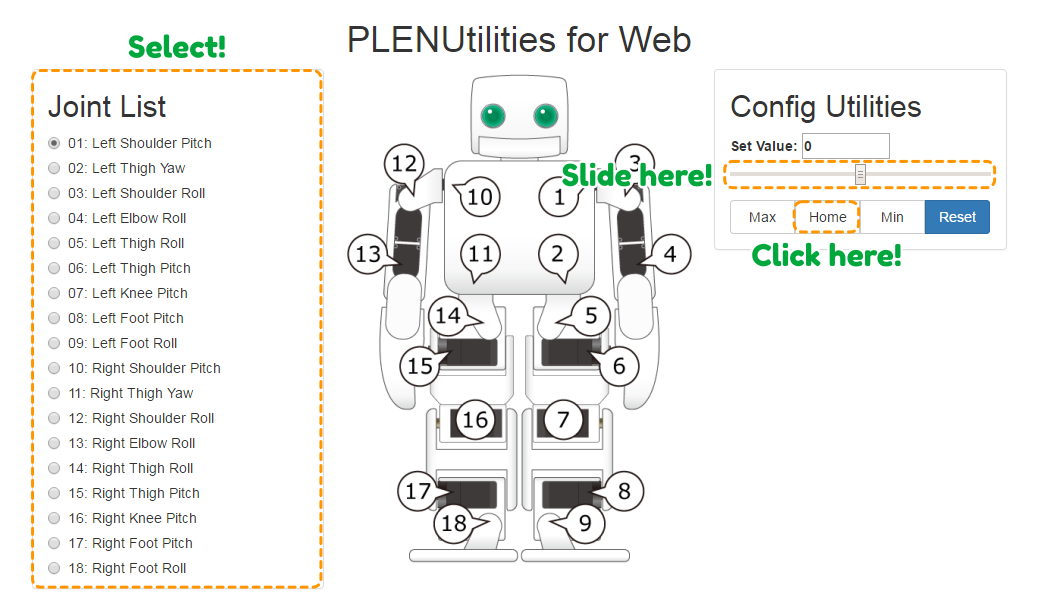
Windows 사용자의 경우 server.exe 를 OSX 사용자의 경우 server.app 를 시작합니다. Windwos 고객은 PLENUtilities.url 를 OSX 사용자의 경우 PLENUtilities.webloc 을 더블 클릭합니다.
-
각 서보 조절용 슬라이더를 PLEN이 직립 자세가 될 때까지 조정합니다.
-
“HOME” 버튼을 누르면 초기 위치를 저장합니다. (최소 위치, 최대 위치를 조정할 필요는 기본적으로 없습니다.)
더 자세한 사항을 조정하려면
다음의 조건을 가미하여주십시오.
-
“걷기”의 모션을 재생하려고, 넘어지지 여부
-
“걷기”의 모션을 재생하려고 손을 허리에 과도하게 칠해지지 않거나
-
“박수”의 모션을 재생하려고 양손을 접하고 지직 소리가 될까
후디(Hudi)를 쉽게 조작 할 수있는 응용 프로그램으로 “PLENConnect”라는 것을 발표하고 있습니다.
여기를 다운로드 해 주셔서 화면 왼쪽의 동그라미를 드래그하여 “걷고”의 확인, NORMAL 모드, 화면 오른쪽의 3 단 중앙의 아이콘을 클릭하여 “박수”의 확인이 각각 가능합니다.